
我們擅長商業(yè)策略與用戶體驗的完美結(jié)合。
歡迎瀏覽我們的案例。
除了依然堅持視覺路線的特斯拉外,今年發(fā)布的電動汽車新車中,沒搭載激光雷達(dá)都不好意思秀自己的自動駕駛能力。
當(dāng)自動駕駛在量產(chǎn)車上從 L2 級向 L2+邁進,各家車企對軟件、硬件的 pk 已經(jīng)到了白熱化階段。除了依然堅持視覺路線的特斯拉外,今年發(fā)布的新車中,沒搭載激光雷達(dá)都不好意思秀自己的自動駕駛能力,ARCFOX 極狐 阿爾法 S、小鵬 P5、蔚來 ET7、上汽 RS33、寶馬 iX、智己 L7 都預(yù)告了激光雷達(dá)的上車。
激光雷達(dá)仿佛成了 L2+,甚至 L3 級、L4 級自動駕駛的代名詞。

激光雷達(dá)是怎么從 Robotaxi 上「頭上長犄角」的龐然大物,變成了量產(chǎn)車上的小巧的「必選項」呢?

體積更小、成本更低,激光雷達(dá)上車的法寶
激光雷達(dá)利用發(fā)射和障礙物反射回的激光來探測障礙物。在這個過程中,光波發(fā)射方式、光束操作、探測、測距以及數(shù)據(jù)處理方式 5 大核心技術(shù)不同,都會得到性能、效果不一樣的激光雷達(dá)。
目前的光電系統(tǒng)中,掃描部件這個類似鏡子的結(jié)構(gòu),將激光光束發(fā)散成更多光線,也是激光雷達(dá)中最大成本單元,直接影響到性能。我們常說的「機械式」「半固態(tài)」「固態(tài)」,就是按照掃描模塊和激光收發(fā)模塊的運動情況不同來分類的。
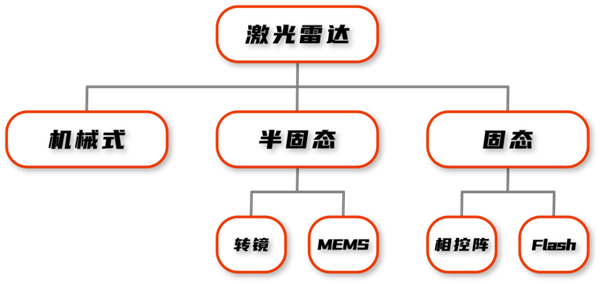
機械式激光雷達(dá)中,「鏡子式」的掃描模塊和激光收發(fā)模塊都可以 360°旋轉(zhuǎn)運動,這兩個模塊 360°的運動能將激光更密集的發(fā)散出去,探測性能最好。但是雙向運動的機械結(jié)構(gòu)也最復(fù)雜,體積龐大。
混合固態(tài)(半固態(tài))激光雷達(dá)中,激光收發(fā)模塊不動,掃描模塊自己運動。這種「鏡子」自己運動,當(dāng)然不如機械式的探測效果好,不過結(jié)構(gòu)上簡化很多,體積也變小了。不過「鏡子」的材質(zhì)、形狀、運動方式不同,半固態(tài)激光雷達(dá)也分成好多種。
純固態(tài)激光雷達(dá),則是激光收發(fā)模塊和掃描模塊都不運動,沒有了內(nèi)部移動,成本最高的掃描模塊可以在結(jié)構(gòu)上簡化,整個激光雷達(dá)的體積和成本也大大降低了。
不同類型的激光雷達(dá),優(yōu)缺點也很明顯。

從機械式、半固態(tài)到純固態(tài),激光雷達(dá)的體積變小,成本也降低了。
而成本,當(dāng)然是車企最關(guān)心的。
早期用在 Robotaxi 上的機械式激光雷達(dá),以 Velodyne 為例,64 線機械激光雷達(dá)在 8 萬美元,32 線機械激光雷達(dá)成本在 2 萬美元。第一款滿足車規(guī)級的激光雷達(dá) SCALA,第一代時的價格也一度達(dá)到 2 萬美元級別。所以目前在量產(chǎn)車上使用 SCALA 的客戶,無論是奧迪 A8,還是奔馳 S 級,都是百萬級豪車的級別,對價格的寬容度很高。那些由終端消費者買單的大量私家車,對價格敏感度就高多了。
主機廠們普遍能接受的價格期望是多少呢?
在 L4 級自動駕駛系統(tǒng)中,激光雷達(dá)的采購價最終能夠達(dá)到 1000 美元以下;
在 L2+自動駕駛系統(tǒng)中,激光雷達(dá)長期目標(biāo)價格能夠達(dá)到 500 美元以下。
因此我們看到,進入 2020 年后,當(dāng)半固態(tài)、固態(tài)激光雷達(dá)逐漸代替機械式雷達(dá),激光雷達(dá)的成本和體積大幅度降低,直接從上萬美元降低到 1000 美元時,逐漸接近車企能夠接受的價格,才有了今天激光雷達(dá)批量上車的局面。
除了價格,尺寸也是激光雷達(dá)批量上車的主要原因。
早年 Robotaxi 上的機械式激光雷達(dá),就像天靈蓋上的犄角,占的體積非常大,完全不能放置在車內(nèi)。如果把這樣的車賣給消費者,恐怕沒有幾個人愿意買賬。

現(xiàn)在「上車」的半固態(tài)激光雷達(dá),體積已經(jīng)縮小到了 1~2 個手機的大小,安置在車頂或者保險杠兩側(cè),大疆展示的激光雷達(dá)甚至能集成在后視鏡上。更小的體積,才能讓激光雷達(dá)不影響量產(chǎn)車本身的造型設(shè)計。

當(dāng)然,價格和尺寸只是萬里長征第一步,性能和可靠性才是王道。
多條技術(shù)賽道并行
已經(jīng)發(fā)布了搭載激光雷達(dá)的車型中,不僅激光雷達(dá)來自不同品牌,位置不同,選擇的路線也有很大差別。俗稱外行人看熱鬧,內(nèi)行人看門道,激光雷達(dá)都有哪些門道了,其實從主機廠關(guān)心哪些指標(biāo)就知道有哪些門道了。
目前,無論是 OEM 還是激光雷達(dá)廠家都達(dá)成共識,高速、擁堵等場景是自動駕駛最大的市場。面對高速、擁堵場景,攝像頭的視覺方案+激光雷達(dá)是最容易實現(xiàn)自動駕駛的。
盡管,很多人把使用激光雷達(dá)和不使用激光雷達(dá)看作兩個技術(shù)的對立面,但現(xiàn)實中,選擇激光雷達(dá),是目前車企實現(xiàn)自動駕駛現(xiàn)階段功能的最優(yōu)方案。
因此車企對于激光雷達(dá)在 L2+的性能要求如下。
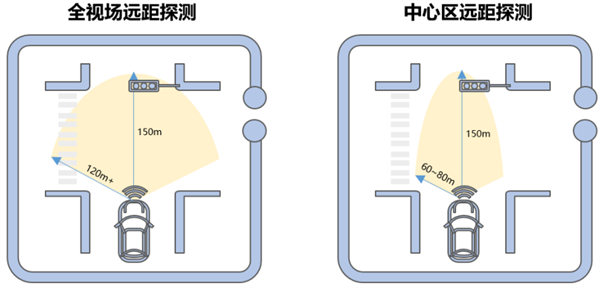
1. 測距距離:探測障礙物的最遠(yuǎn)距離。比如折射率低于 10%的物體(比如純黑色車輛),高速場景下至少有 150 米以上的探測距離。
2. 視場角 FOV:探測的「視野」范圍,F(xiàn)OV 越大,「視野」越好。激光雷達(dá)應(yīng)具有 120°FOV 寬視角,滿足十字路口等特殊場景的檢測。
3. 測距的精準(zhǔn)度:精確度越高,探測到障礙物的位置信息越準(zhǔn)確。精確度要滿足≤3cm,角分辨率越小越好,水平和垂直角分辨率≤3°。
4. 點云:點云和線束數(shù)量越多,感知的障礙物越精確。激光雷達(dá)應(yīng)具備 100 線以上的掃描效果和百萬級別點頻,這樣,遇到 150m 外的物體時,也能反射回足夠多的激光點云用于識別。
5. 車規(guī)級:具有車規(guī)級標(biāo)準(zhǔn)的工作溫度,能夠規(guī)模化生產(chǎn)。
這些要求看起來不復(fù)雜,但其實都滿足這些條件的激光雷達(dá),目前基本上寥寥無幾,或多或少都有不滿足的地方。這就是為什么,現(xiàn)在各車企在激光雷達(dá)上選擇的路線不同,安裝的位置也不同。
目前發(fā)布的車型中,大多數(shù)都選擇了半固態(tài)激光雷達(dá):小鵬 P5 搭載的 Livos 激光雷達(dá)屬于棱鏡方案,蔚來 ET7 的 Innovusion 和 R 汽車 ES33 的 Luminar 激光雷達(dá)屬于轉(zhuǎn)鏡方案,華為的激光雷達(dá)屬于轉(zhuǎn)鏡方案,Lucid Air 選擇的速騰聚創(chuàng) M1 激光雷達(dá),都是半固態(tài)激光雷達(dá)。這其中有成本、體積的原因,也有兼顧了性能需求的考慮。
蔚來 ET7、上汽 R ES33 以激光雷達(dá)作為核心傳感器,都選擇了轉(zhuǎn)鏡式激光雷達(dá),也就是通過平面鏡繞圓心 360°旋轉(zhuǎn),將發(fā)射器發(fā)出的激光反射出更多的線束。

轉(zhuǎn)鏡式激光雷達(dá)最遠(yuǎn)探測距離 500 米,針對 10%低反射物的探測距離達(dá)到 250m,滿足了探測距離的要求。針對十字路口這樣的場景,轉(zhuǎn)鏡式激光雷達(dá)的 FOV 角度大,120°*30°的大角度,能探測垂直于行駛方向道路上的障礙物。因為 FOV 更大,這兩款車也都選擇了頂置,安置在擋風(fēng)玻璃上端的一顆激光雷達(dá),就能夠探測足夠?qū)挿秶膱鼍啊?/p>

除了蔚來和上汽,BBA、本田選擇法雷奧的激光雷達(dá)也是轉(zhuǎn)鏡方案,作為第一個通過車規(guī)級、成本可控的激光雷達(dá),可靠的、可批量化方案,顯然目前更多車企的選擇。
與蔚來和 R 汽車不同,小鵬 P5 沒有把激光雷達(dá)作為核心傳感器,而是以攝像頭和高精地圖組合的視覺方案作為自動駕駛的核心,激光雷達(dá)只是一種安全冗余的手段。
因此,小鵬 P5 采用的 Livox 激光雷達(dá),屬于棱鏡式。

就像小時候玩的三棱鏡,一束光達(dá)到棱鏡上,能折射出彩虹的光譜,棱鏡式激光雷達(dá)發(fā)射器數(shù)量更多,點云密度更高,這樣探測障礙物精確度高。不過兩個棱鏡折射出的點云沒辦法做到一行一列的點云形狀,而是中間密四周稀疏的菊花型。想要得到密集的點云,需要對同一個位置的掃描時間更長。
因此小鵬 P5 在前保險杠兩側(cè)配備了兩顆激光雷達(dá),來保障點云覆蓋密集。因此這個激光雷達(dá) 10%低反射物的探測距離只有 150 米,點云密度等效于 144 線,比其他幾家的激光雷達(dá)近得多。不過作為一種硬件冗余手段,倒是足夠了。
除了棱鏡式和轉(zhuǎn)鏡式外,半固態(tài)激光雷達(dá)中技術(shù)相對最成熟、產(chǎn)業(yè)鏈也最完整的 MEMS 是很多人認(rèn)為的當(dāng)下主流。Lucid Air 采用的就是速騰聚創(chuàng) M1 激光雷達(dá)。
MEMS 激光雷達(dá)是利用半導(dǎo)體器件微振鏡做很小的平行運動動和扭轉(zhuǎn),部件運動小,結(jié)構(gòu)簡單。不過傳統(tǒng) MEMS 技術(shù)的有效探測距離近,只有 50m,F(xiàn)OV 角度只能達(dá)到 30°,所以,目前國內(nèi)的新能源汽車目前還沒有采用 MEMS 技術(shù)激光雷達(dá)的。
當(dāng)然也有例外,速騰聚創(chuàng) M1 采用了新技術(shù)把 FOV 擴大到 120°,探測距離 200m,10%低反射物的探測距離 150m,這樣就能滿足車企的需求了。
除了以上幾家搭載了不同技術(shù)路線的半固態(tài)激光雷達(dá),也有直接選擇啃硬骨頭的。長城摩卡就直接選擇了 Ibeo 公司提供的 Flash 固態(tài)激光雷達(dá),由于沒有運動部件,體積更小,成本更低、可靠性也更高。不過,目前的純固態(tài)激光雷達(dá)還處在探索階段,探測距離只有 130 米。不過,長城摩卡 2022 年才交付,到時候固態(tài)激光雷達(dá)的性能會進化到什么地步,是騾子是馬,還要等上市之后見分曉。
最后
自動駕駛從零開始走到今天,當(dāng)停車場、高速路這樣的強需求場景下,越來越多的輔助駕駛功能逐漸落地時,自動駕駛也面臨更復(fù)雜場景下的困境。激光雷達(dá)這種新的感知手段,被無數(shù)車企和科技公司當(dāng)成了困境中的一顆「救命稻草」。
2021 年作為激光雷達(dá)量產(chǎn)上車的「元年」,還只是一個開端。故事的開端通常都是一團亂麻,激光雷達(dá)的開端也不例外。每家車企和激光雷達(dá)公司都嘗試了不同的路線:有的選擇了不同方案的半固態(tài)激光雷達(dá);有的直接跨過中間態(tài),選擇了固態(tài)激光雷達(dá);當(dāng)然也有更大膽的,直接拋棄了激光雷達(dá)。
我們能清楚的看到每種路線的優(yōu)點,也能看到它的很多不足。這是一項新技術(shù)上車時,必須經(jīng)歷的「陣痛階段」。只有經(jīng)歷了不同技術(shù)路線的探索,激光雷達(dá)的路線才能越來越清晰,做到真正的「量產(chǎn)上車」。
在這之前,激光雷達(dá)還有一條曲折的長路要走。

小米應(yīng)用商店發(fā)布消息稱 持續(xù)開展“APP 侵害用戶權(quán)益治理”系列行動 11:37:04
騰訊云與CSIG成立政企業(yè)務(wù)線 加速數(shù)字技術(shù)在實體經(jīng)濟中的落地和應(yīng)用 11:34:49
樂視回應(yīng)還有400多人 期待新的朋友加入 11:29:25
亞馬遜表示 公司正在將其智能購物車擴展到馬薩諸塞州的一家全食店 10:18:04
三星在元宇宙平臺推出游戲 玩家可收集原材料制作三星產(chǎn)品 09:57:29
特斯拉加州San Mateo裁減229名員工 永久關(guān)閉該地區(qū)分公司 09:53:13










